Welcome! I'm
Abhishek

About Me
I am a dedicated mechatronics engineer with a passion for robotics. My research interests center around achieving autonomy in complex systems, particularly in challenging environments like space exploration. I’m focused on developing advanced control architectures that drive smarter, adaptive robots capable of handling the unexpected. My interests span multi-agent systems, non-linear and learning-based control, with the goal of pushing the boundaries of what autonomous systems can achieve in complex and dynamic settings.
Skills
Education
Experience
- Programming Languages
Python, C++, Embedded C, Lua, - Tech Stack
Embedded Systems, Edge Computing, Computer Vision, Control Systems, Computer Aided Design (CAD), SLAM, Swarm robotics, Drones, Machine Learning - Tools and Frameworks
Robot Operating System (ROS2), Gazebo, Copelliasim (V-REP), GNU Octave, Fusion 360, Git - Soft Skills
Leadership, Creativity, Communication, Problem Solving, Team Work
- Symbiosis University of Applied Sciences, Indore
Bachelor of Technology in Mechatronics (2019-2023) - Colonel's Academy, Mhow
Senior Secondary Education - St. Joseph's Convent Sr. Sec. School, Ratlam
Primary Education
- e-Yantra, Indian Institute of Technology, Bombay
Senior Project Technical Assistant (August 2023 - present) - Volvo Eicher Commercial Vehicles Ltd., Pithampur
R&D Intern (June 2022 – December 2022) - Delite Automac Pvt. Ltd.
Summer Intern (July 2021 - September 2021
Experience
e-Yantra, ERTS Lab, IIT Bombay
Contributing as a Developer to the e-Yantra Project. Mechanical design and software development for research projects in the Lab. Individual and collaborative research projects in robotics. Mentor in e-Yantra Robotics Competition (eYRC).
Learn moreVolvo-Eicher CV
Worked on Digital Twin, data analytics, telematics, connected vehicles, EV, and ADAS projects, contributing towards advanced vehicle technology development. Conducted research and development activities, enhancing vehicle performance and connectivity through innovative solutions and data-driven insights.
Learn moreDelite Automac
Provided 2D drawings for machining of spare automotive parts. Worked on various machining tools like lathe, power press, hydraulic press, shearing and bending machines.Contributed in production efficiency improvement planning for the manufacturing plant.
Projects
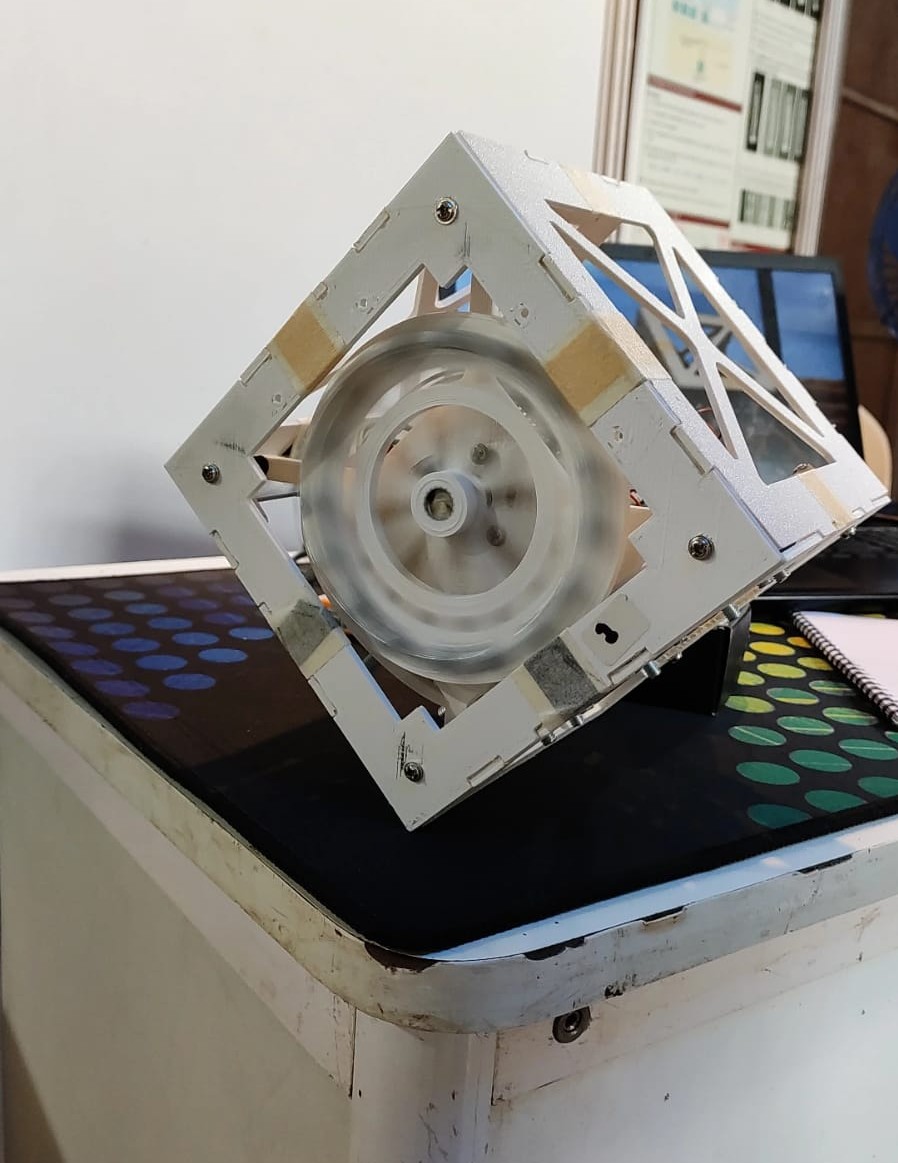
Self-balancing Cube
A cube-shaped Reaction wheel-based 3D Inverted Pendulum that balances using LQR.
linkRealtime Motion Capture System
A low-cost motion capture system that can track and record spatial movements of multiple objects using IR LED based markers and up to 4 cameras.
linkAutonomous Rover(s)
ROS-based SLAM implementation and autonomous navigation in multiple differential drive and skid-steer robots.
link